
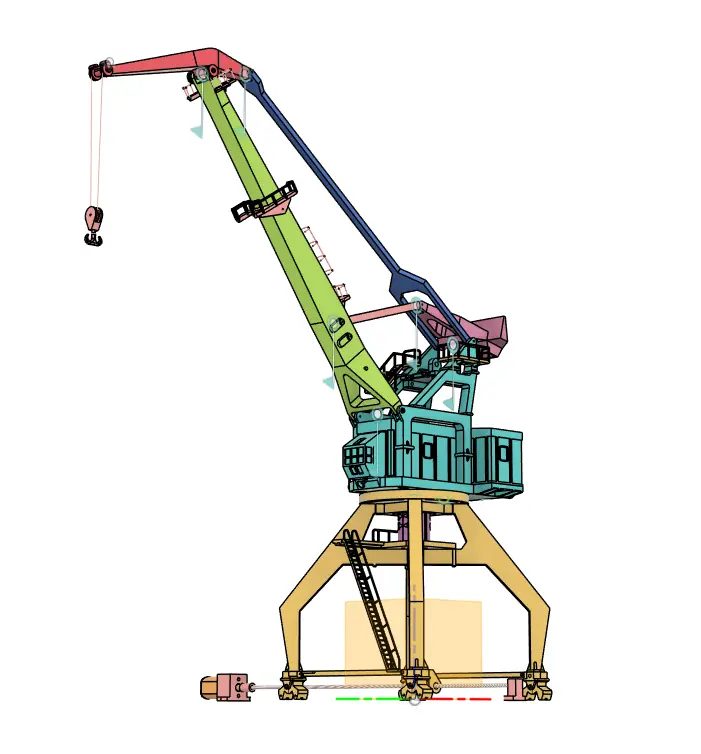
Моторизованная модель портального крана в масштабе 1:87
Представляю модель портового портального крана в масштабе 1:87, напечатанную на 3D-принтере и моторизованную с помощью плат Arduino и STM32. У крана 4 степени свободы, моторизованные функции включают:
-
передвижение крана по рельсам,
-
поворот башни,
-
наклон стрелы,
-
подъем и опускание крюка.
Кроме того, можно управлять прожектором крана.
Изначально я хотел сделать "крюк" в виде электромагнита или захвата, но в итоге решил оставить обычный крюк — это значит, что груз необходимо цеплять вручную.
Проект состоит из двух больших частей: механика (чтобы всё могло двигаться как надо) и электроника с прошивкой (чтобы всем этим управлять).
Существуют готовые модели похожих кранов, например, ROCO 40110, 41290, 41296 и другие. Они географически относятся к Западной Европе, и производят впечатление техники эпохи Первой или Второй Мировой войн.
Целью данного проекта же является воссоздание кранов позднего СССР, которые до сих пор широко распостранены на просторах СНГ и постсоветского пространства, т.е. для макетов 4, 5, 6 эпох.
Кран вдохновлён двумя моделями — "Кировец" и "Альбатрос". Геометрия в основном взята у "Кировца", но некоторые части (например, поворотный узел) — от "Альбатроса", так как там можно разместить более крупный поворотный блок.



🏗 Механика

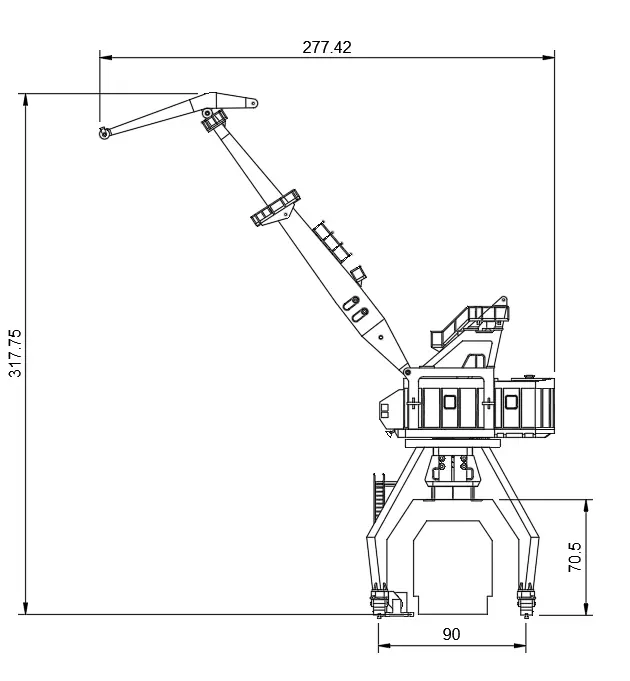
Хотя модель рассчитана на макет в масштабе 1/87, реальный масштаб крана по высоте и ширине ближе к 1/116 (на ~25% меньше). В частности, портал рассчитан только на одну железнодорожную колею (с габаритами по стандарту NEM-102), хотя в реальности под краном проходят две.
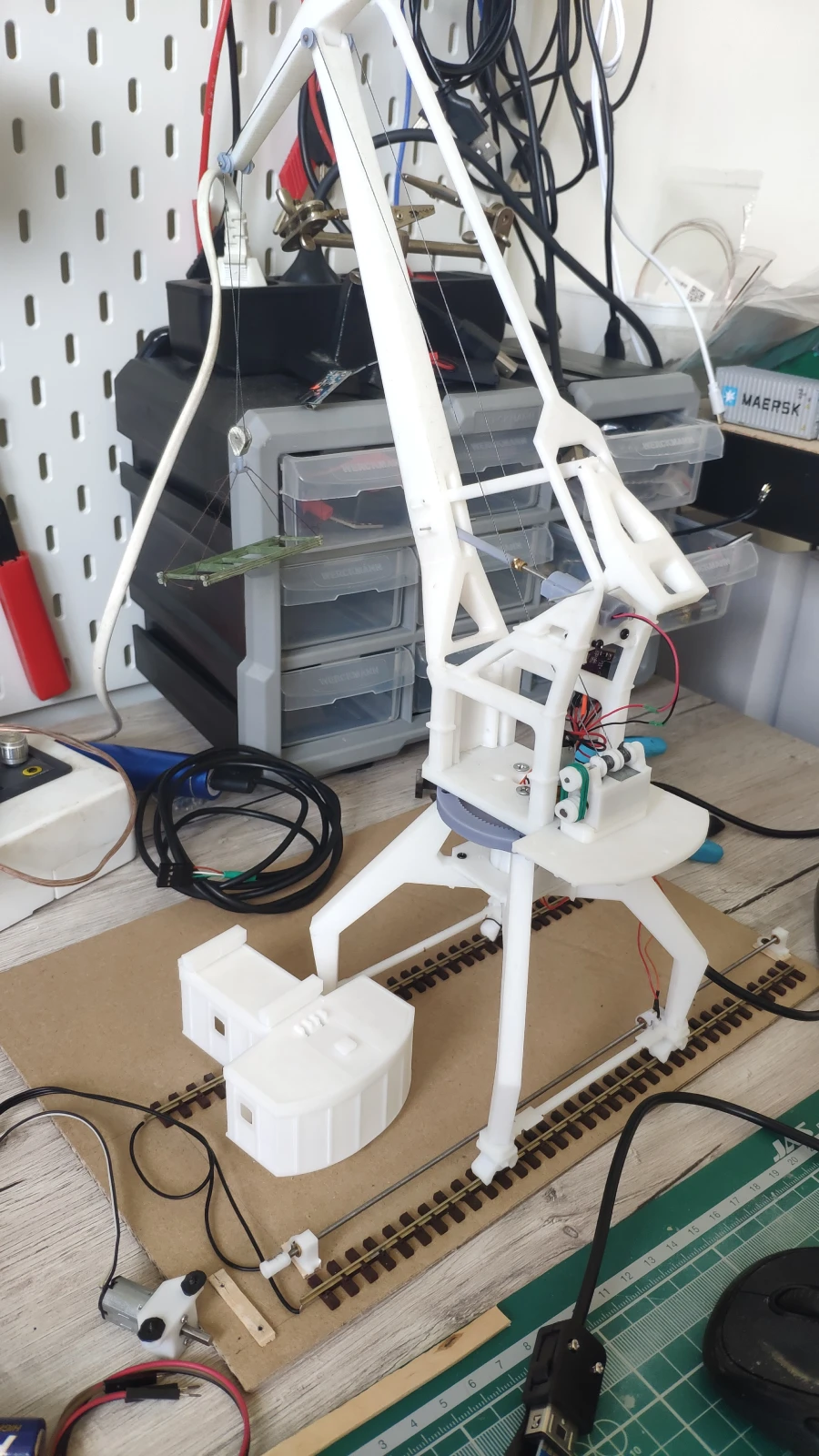
Модель создана в ПО Fusion 360 и напечатана на 3D-принтере. Крупные несущие элементы сделаны с помощью FDM-печати, мелкие декоративные и точные механические детали (например, шестерни и шкивы) напечатаны на фотополимерном принтере.
Движущиеся соединения собраны на осях из канцелярских скрепок, а неподвижные части склеены или соединены саморезами (чтобы можно было разбирать для обслуживания).
Видео: вращение поворотной платформы и наклон стрелы (на скорую руку запрограммировано на Arduino с управлением Wii Nunchuck).



🔄 Скользящее кольцо
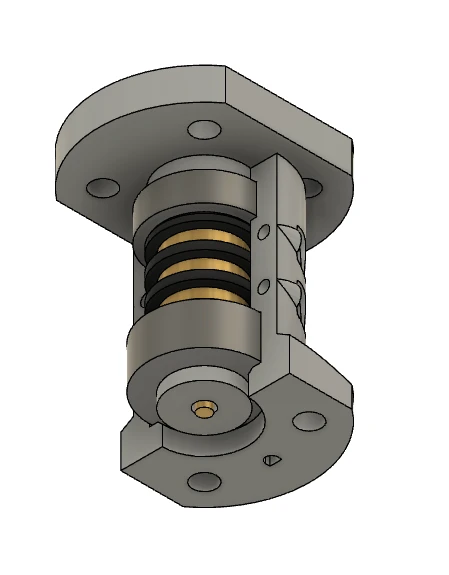
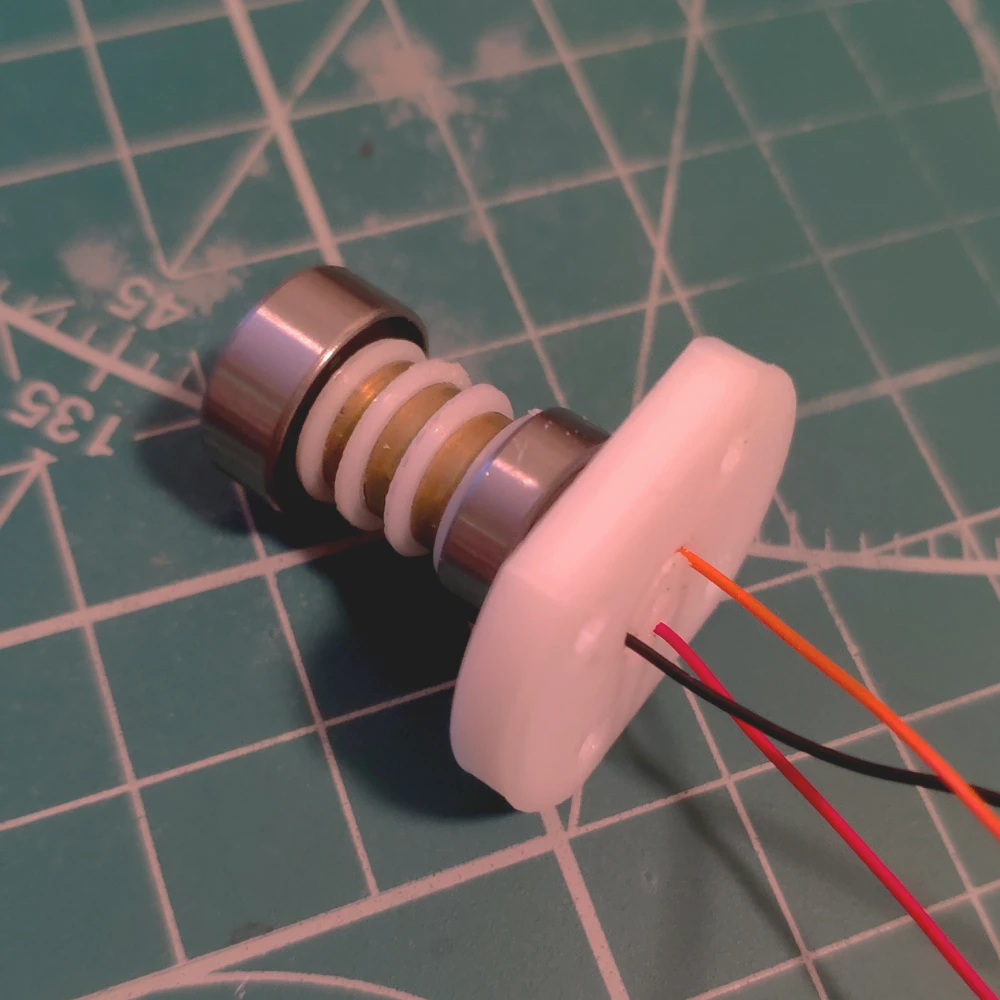
В основании башни стоит 3-контактное скользящее кольцо, которое передаёт питание и сигналы на поворотную часть. Оно должно выдерживать нагрузки от наклона стрелы и перемещения груза. Для этого используются два довольно больших шарикоподшипника (со внутренними диаметрами 6 мм и 8 мм), корпус напечатан на FDM-принтере. Скользящие контакты сделаны из латунных колец (напилены из латунной трубки) на подвижной части и проволоки из фосфорной бронзы на неподвижной.
Кольцо работает, проблем с контактом замечено не было, однако присутствует осевой люфт, и долговечность контактов под вопросом. В следующих проектах я, наверное, попробую готовые решения.
🔩 Линейный привод
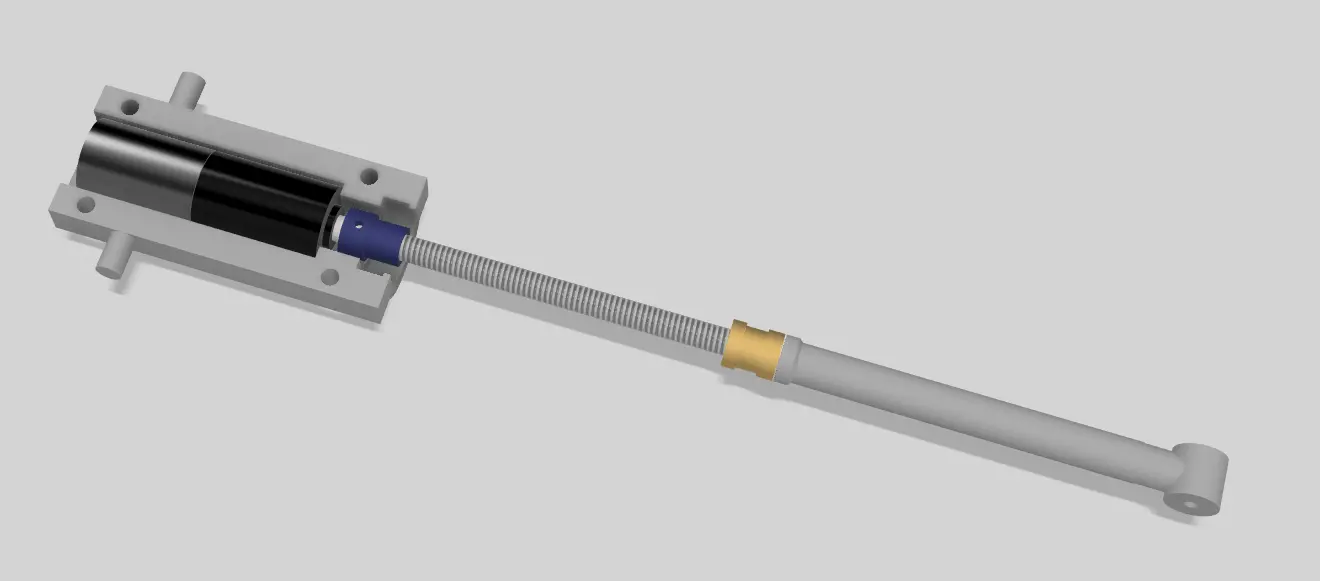
Линейный привод отвечает за наклон стрелы. Он сделан из:
-
мотора диаметром 6 мм с планетарным редуктором,
-
резьбовой шпильки М2,
-
гайки М2 на подвижной части,
-
подшипника для центрирования шпильки,
-
фотополимерных деталей.
Я пробовал использовать обычный RC-сервомотор, но даже девятиграммовый оказался слишком громоздким (а меньшего размера - слишком слабые).
❗ Важно: никаких концевых выключателей в модели не предусмотрено, поэтому управлять краном должен обученный персонал! Иначе шпилька просто выкрутится, и стрела упадёт.
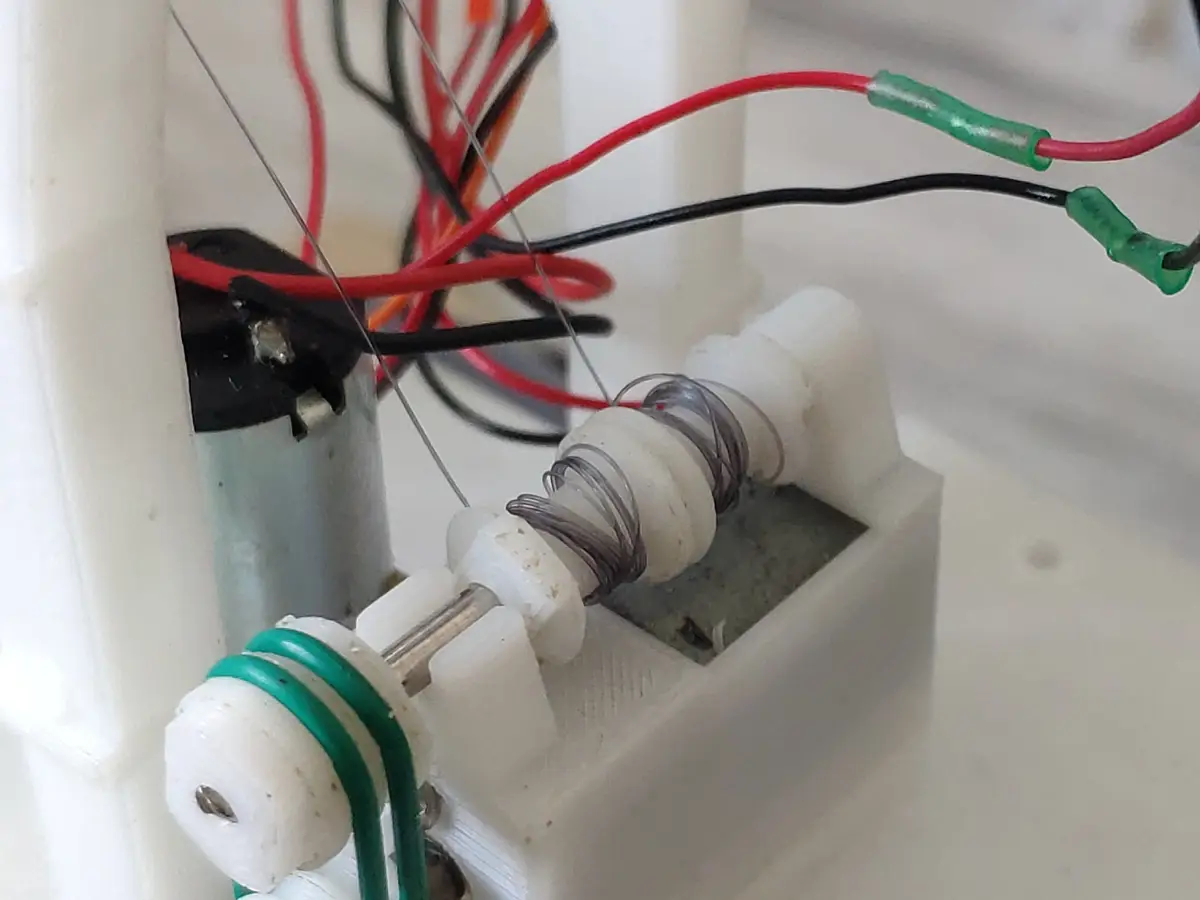
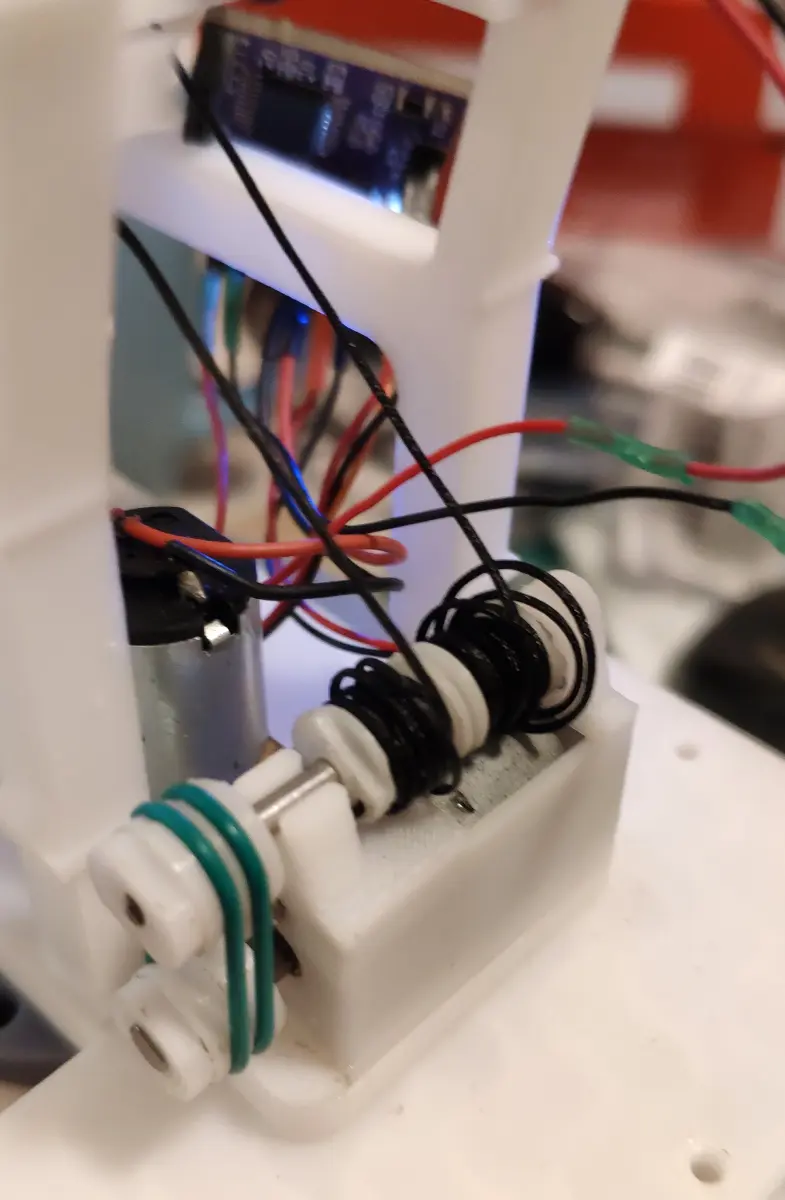
🎣 Лебёдка
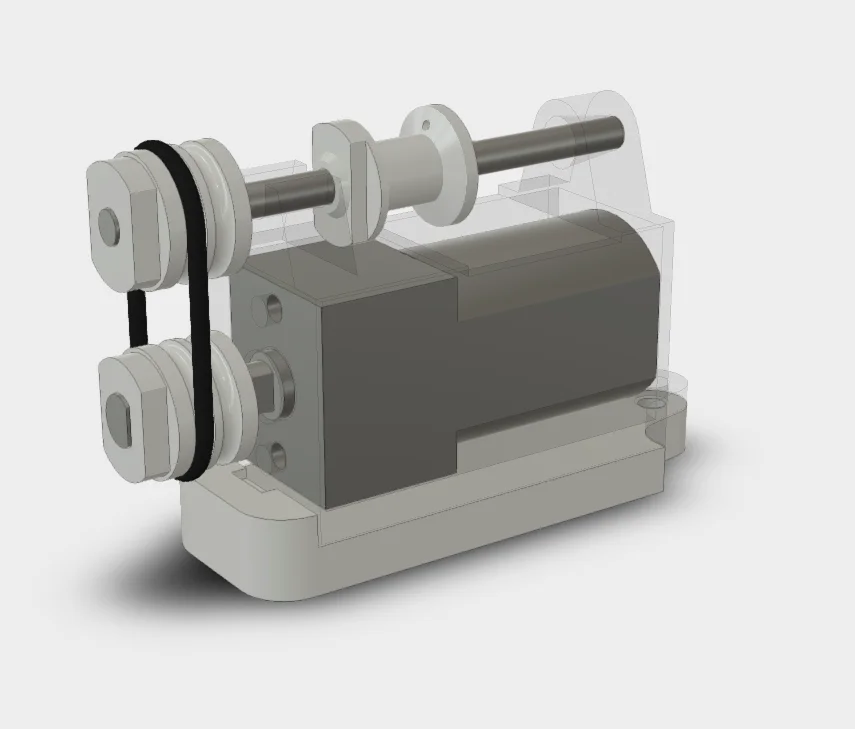
Лебёдка — важнейший элемент крана. В модели она сделана на базе мотор-редуктора N20 и двух резиновых колец. Применение трансмиссии из резиновых шкивов позволяет
-
уменьшить габариты, и расположить барабаны над мотором,
-
ограничить крутящий момент (кольца проскальзывают при перегрузке).
Видео: работа лебёдки.
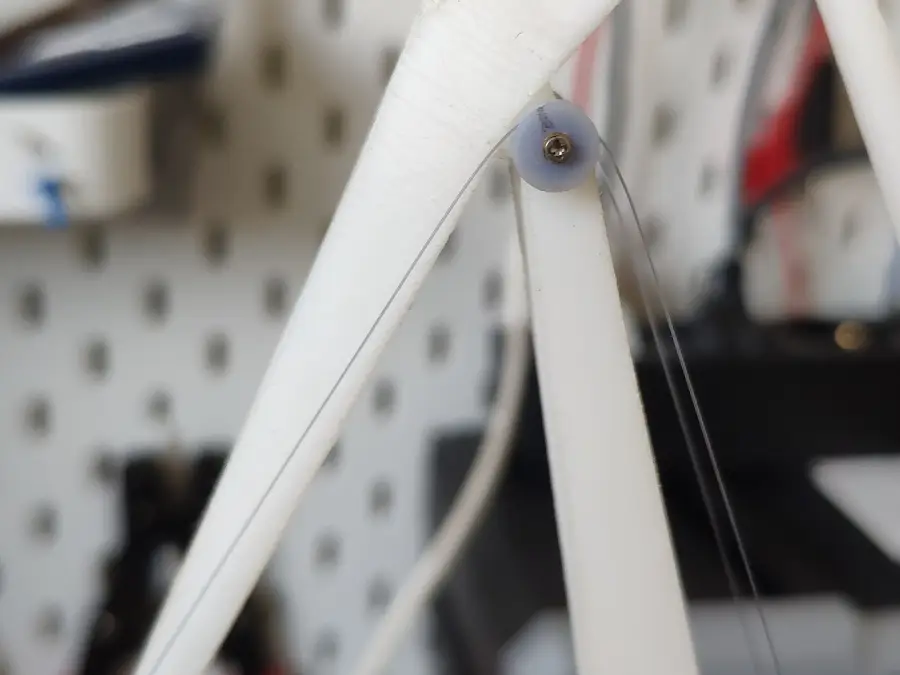
🧵 Тросы
Выбрать подходящий материал для тросов оказалось сложной задачей. Требования к тросам весьма противоречивы, они должны быть: * достаточно толстыми для реалистичности, * тонкими и гибкими, чтобы свободно свисали под собственным весом, * не плетёными (иначе закручиваются со временем), * тёмного цвета.
Я перепробовал: обычные нитки (тонкие, но скручиваются), вощёную кожаную веревку (толстая, гибкая, но скручивается), полиэстеровую нить (идеальная толщина, но скруичвается), чёрную рыболовную леску 0.16 мм (слишком жёсткая), "эластичную леску" с алиэкспресса (белая цвета, слишком растяжимая).
В итоге остановился на плетёной мультифиламентной леске 0.12 мм (с элиэкспресса). Она очень прочная (тяжело разрезать даже хорошо подогнанными ножницами), не скручивается, но жёстче, чем хотелось бы.
💡 Возможно, всё же стоит попробовать обычную плетёную нитку, но правильно раскручивать её перед установкой, чтобы не запутывалась. Проверю это в следующих проектах.

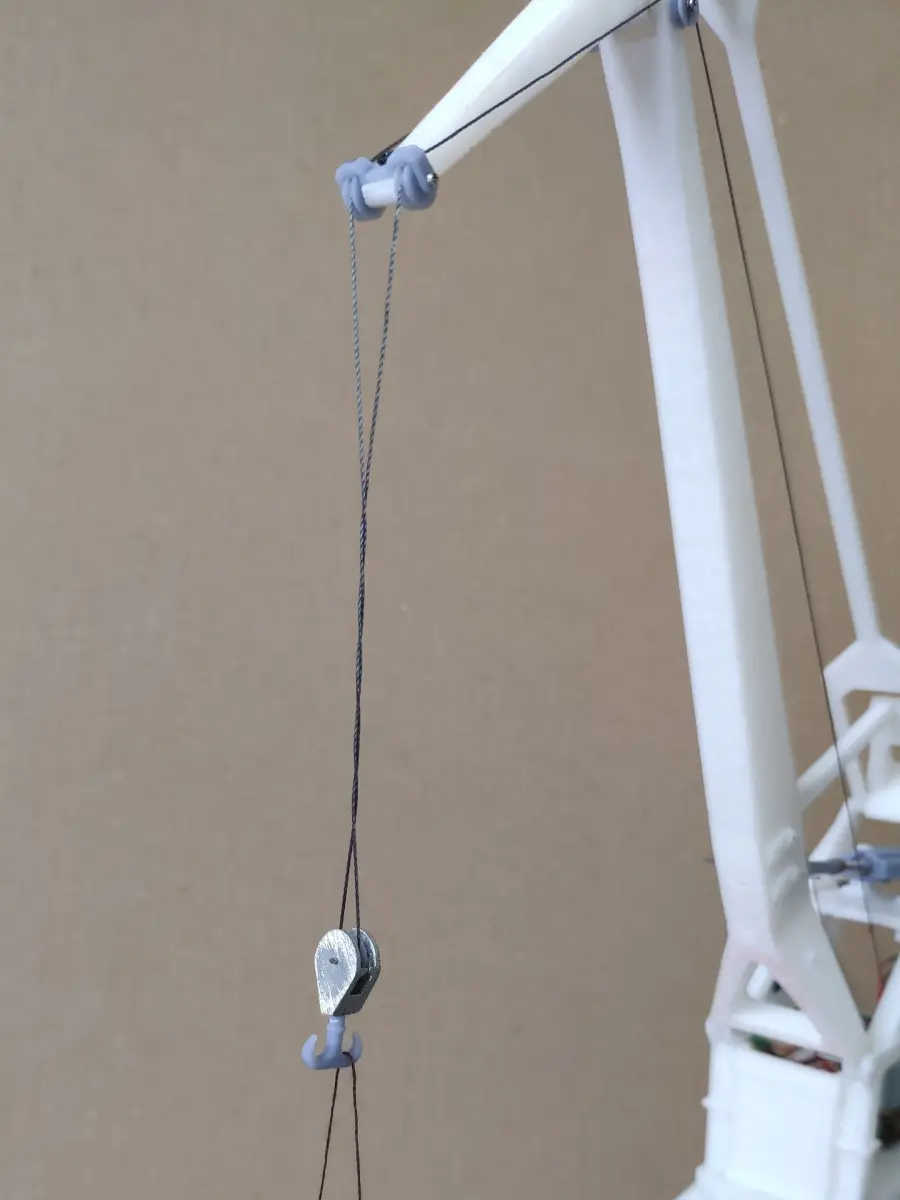
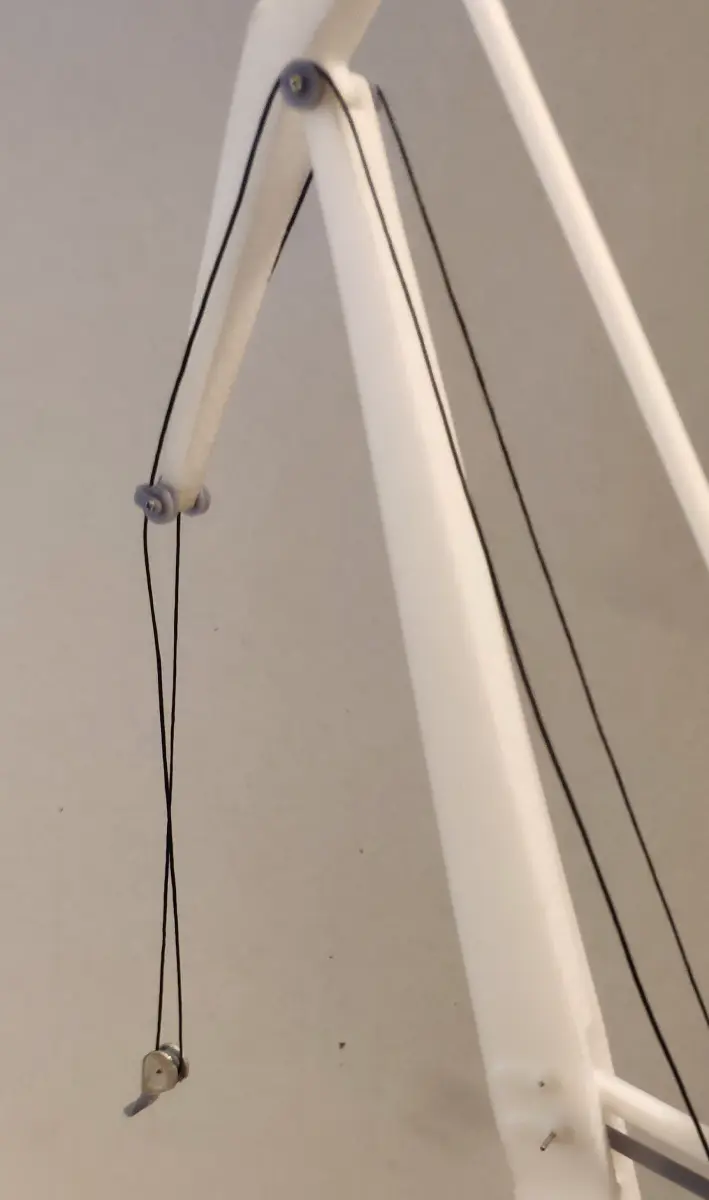
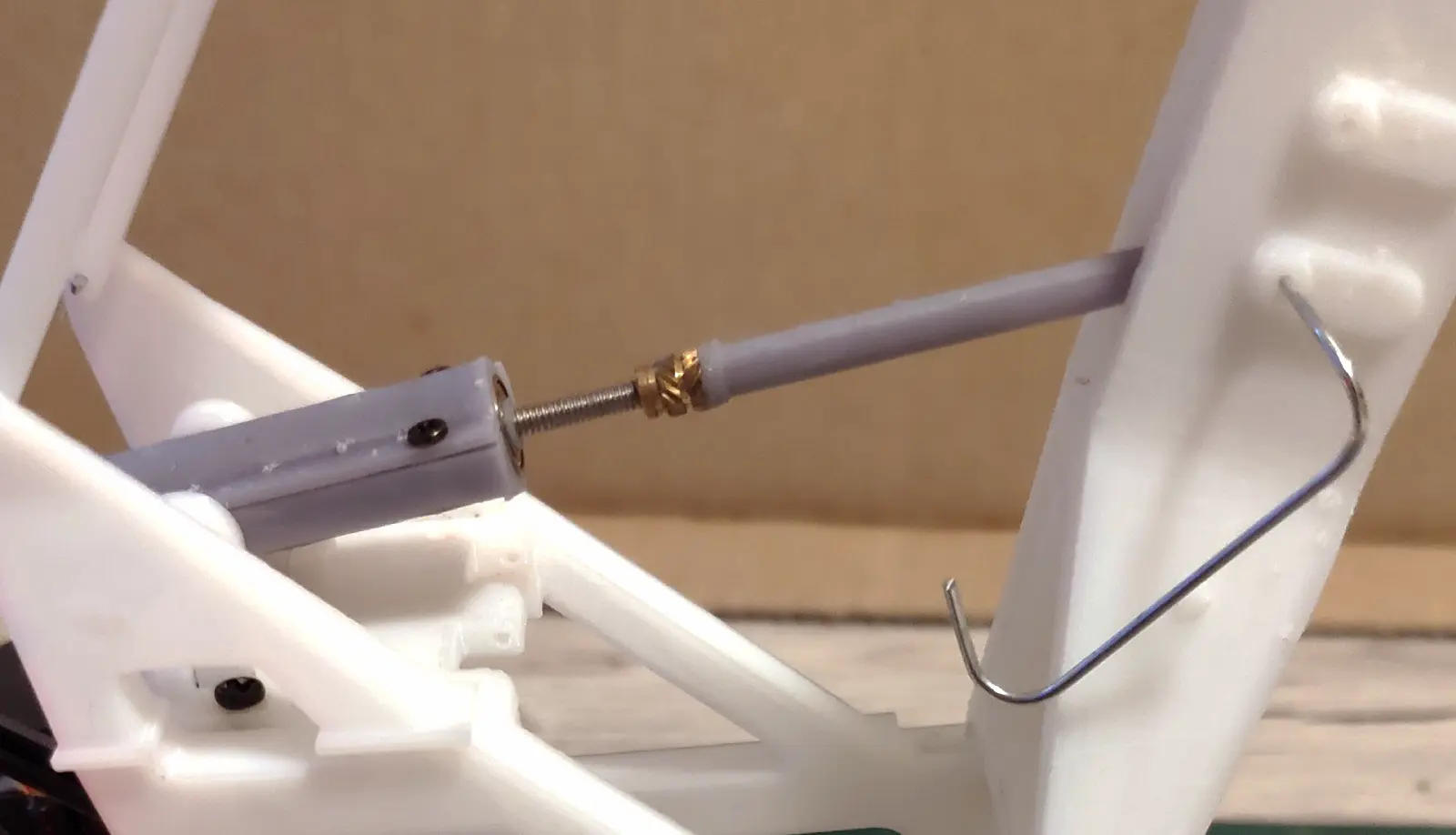
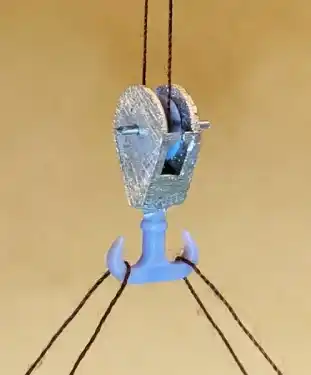
⚓ Крюк
Если на конце троса слишком малый вес, натяжения троса может оказаться недостаточно для разматывания, он запутается на барабане и не опустится вниз (см. фото выше). Когда на крюке груз, такой проблемы не стоит, но примерно половину времени крюк двигается без груза, так что сам крюк должен быть максимально тяжёлым.
Я решил отлить крюковую подвеску из припоя с помощью паяльниика и формы, напечатанной на фотополимерном принтере, в домашних условиях. Фотополимер вообще не выдерживает такого нагрева и трескается (а потом разваливается), но формы хватило на то, чтобы с четвертой или пятой попытки отлить удачную деталь.
Сам крюк напечатан из фотополимерной смолы.


⚡ Электроника
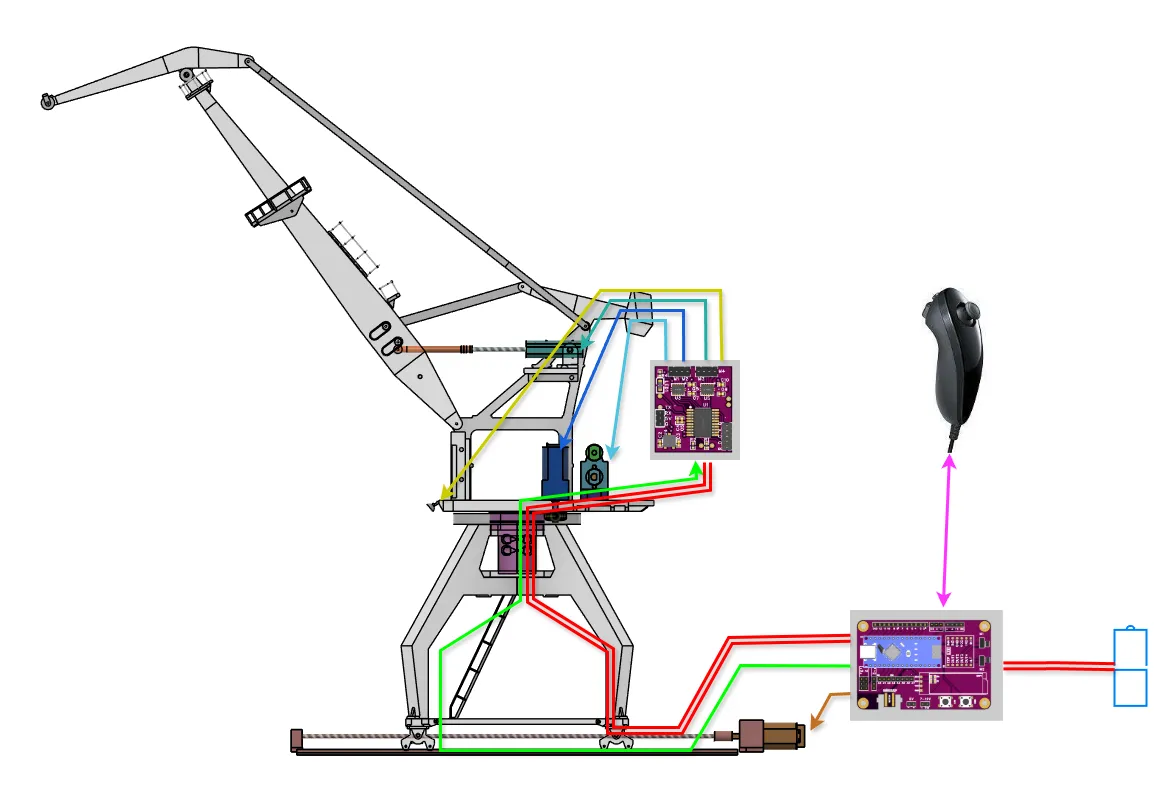
Система управления состоит из двух самодельных плат: плата в башне крана управляет поворотом, наклоном стрелы и лебёдкой; плата на земле (под макетом) управляет передвижением крана по рельсам. Платы разрабатывались в EasyEDA и производились в JLCPCB.
🗼 Плата башни
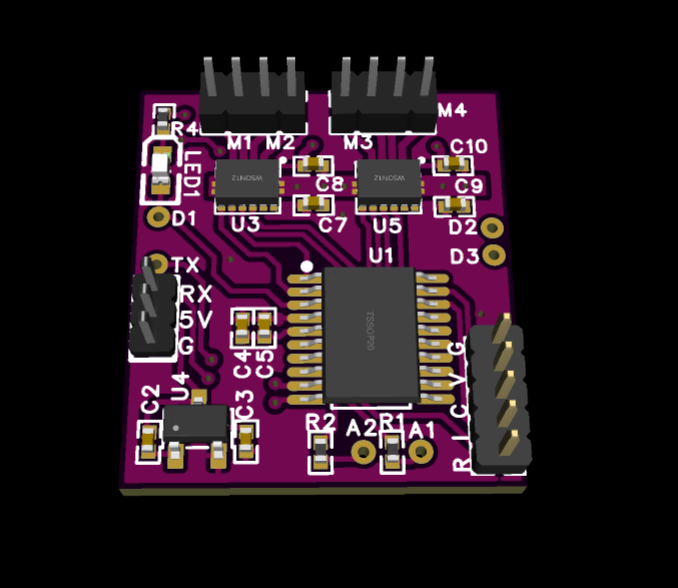
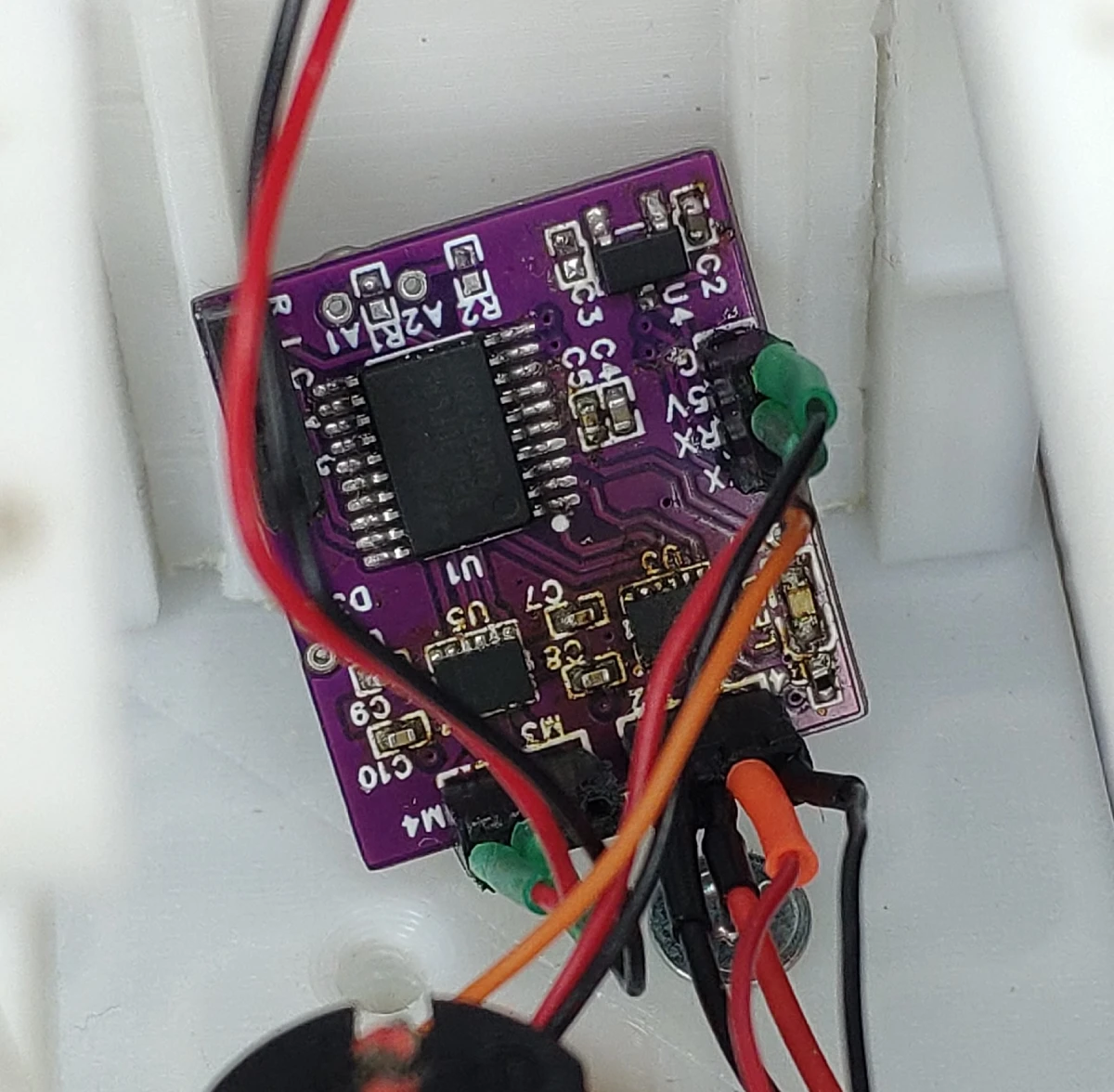
В башне не так много места, и туда не входит Arduino Nano с драйверами моторов, поэтому была разработана и изготовлена маленькая кастомная печатная плата с микроконтроллером STM32G0 и двумя H-мостами DRV8835. Суммарно она может управлять 4 моторами, но из башни крана надо управлять только тремя, четвертый находится на земле.
Также к плате подключен прожектор из светодиода тёплого белого цвета, размещенный около кабины.
❗ Вообще стоило бы добавить больше подсветки — выглядело бы живее.
🔌 Соединение с землёй
Электропитание (5V) подаётся через рельсы, а команды передаются через стальную резьбовую шпильку, которая двигает кран. Иногда контакт через шпильку теряется, и команды перестают поступать в башню, пока не "поможешь" ему рукой. Чтобы уменьшить риск того, что неуправляемый кран снесет детали макета, в прошивке платы предусмотрена защита — если данные перестают приходить, моторы останавливаются.
🎮 Наземная станция и пульт управления
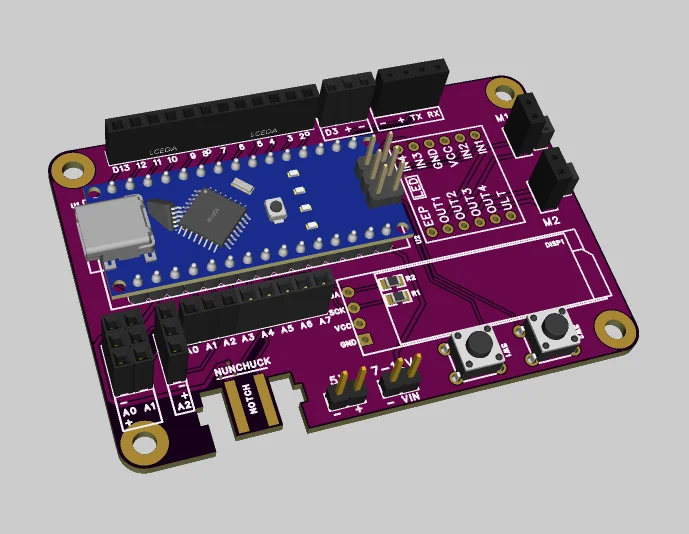
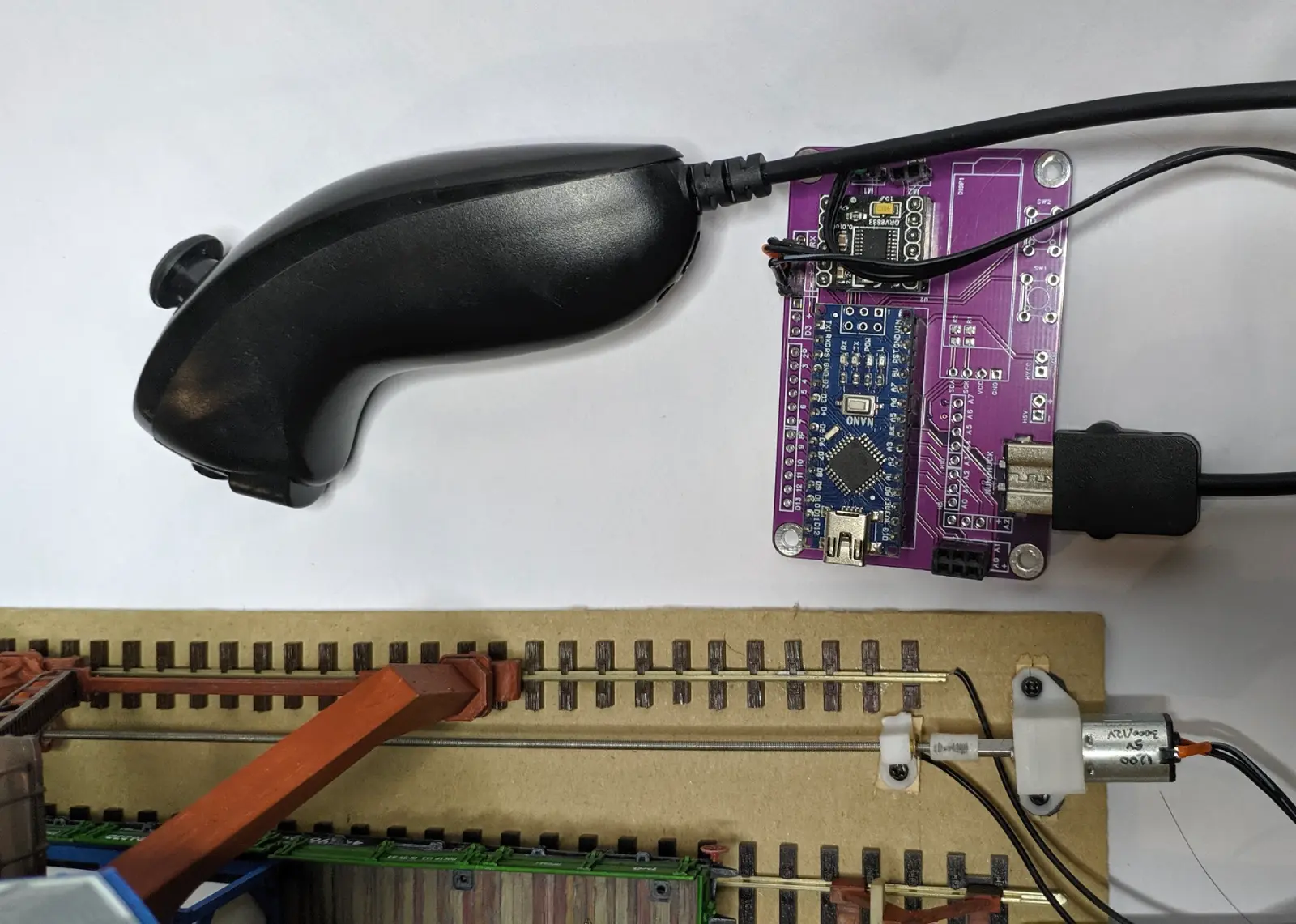
Управление сделано на базе контроллера Wii Nunchuck (его китайском клоне). У него имеется джойстик, 2 кнопки и акселерометр. Джойстика и кнопок достаточно для управления четырьмя моторами и освещением крана, а акселерометр, возможно, пригодится в будущем.
Контроллер подключается к Arduino Nano по I2C, сама Arduino отправляет команды в кран по UART (толко в один конец). Arduino также управляет мотором, двигающим весь кран по рельсам; для этого предусмотрен модуль с H-мостом DRV8833. Для удобства компоненты закреплены на второй кастомной плате.
Весь проект питается от 5В, т.е. от телефонной зарядки или павербанки.