Crane updates
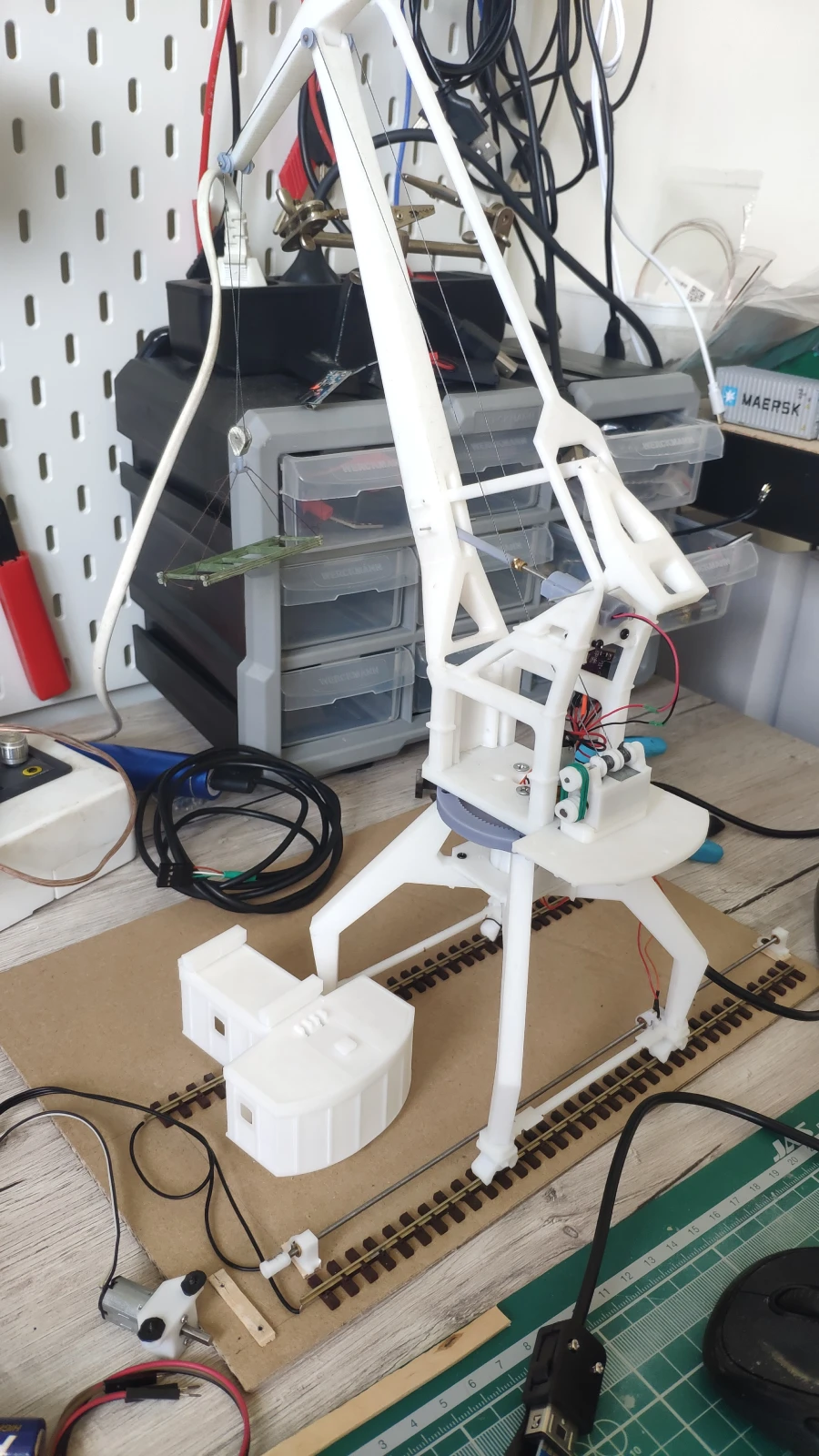
The crane mechanics is close to completion
I’ve tested all 4 motor functions. The last one, whole crane lateral movement, is too slow, so I am waiting for a different N20 motor to arrive. Then I’ll need to replace the thread with a fishing line. The thread is prone to tangling due to braided fibers having some tendency to un-braid. Hopefully the fishing line will be better.
The whole construction currently looks like this:
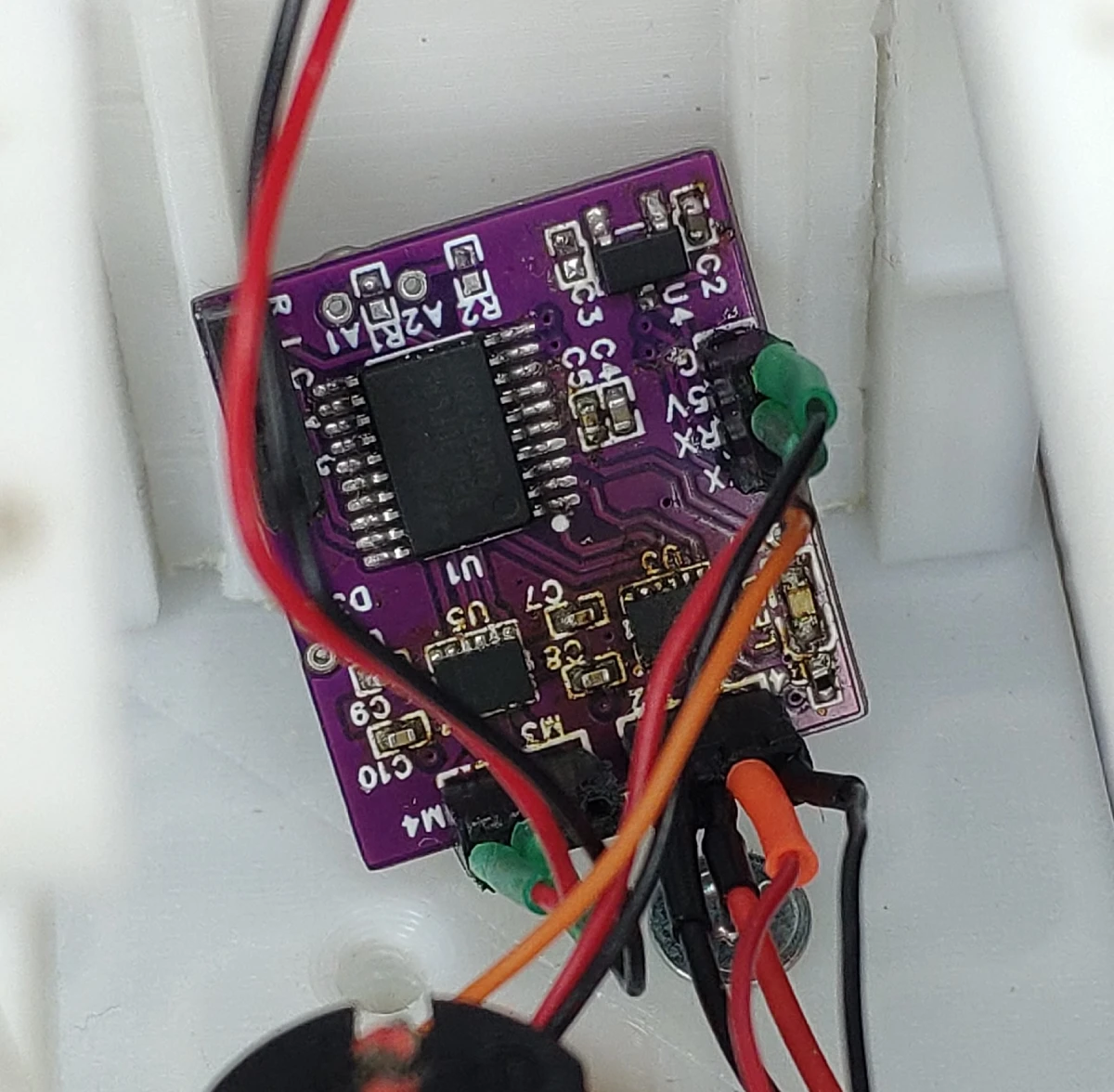
The motorboard project is considered complete
The PCB has been soldered and works, the firmware seems to spin the motors as needed. The lamps will also probably work when added.
Project description is here.