Updates for February and March
So, here is what I’ve been doing for the past 2 months.
Portal crane
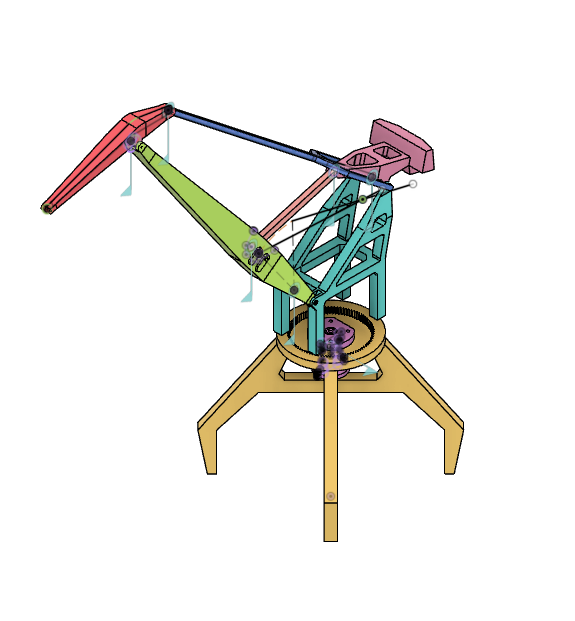
My next big project a level-luffing portal crane. The model is based on Albatros crane from TAKRAF and Kirovets crane from USSR. The prototypes seem to still be used widely across ex-Soviet and ex-Eastern bloc countries.
The model is designed to be used on 1:87 layouts, but it’s going to be scaled down as much as possible, otherwise the structure will dominate any layout that is not museum-sized. So the base structure will span only 1 rail track (the original’s spans 2 tracks), while retaining overall proportions. Overall, it’s about XX% less than true 1:87.
Height in topmost position is around 37cm, and length in lowered position is around 28cm. Reach from center is 21cm.
Main feature is going to be full motorization and ability to remote control it. For that, some electro-mechanical components also need to be designed.
Subprojects
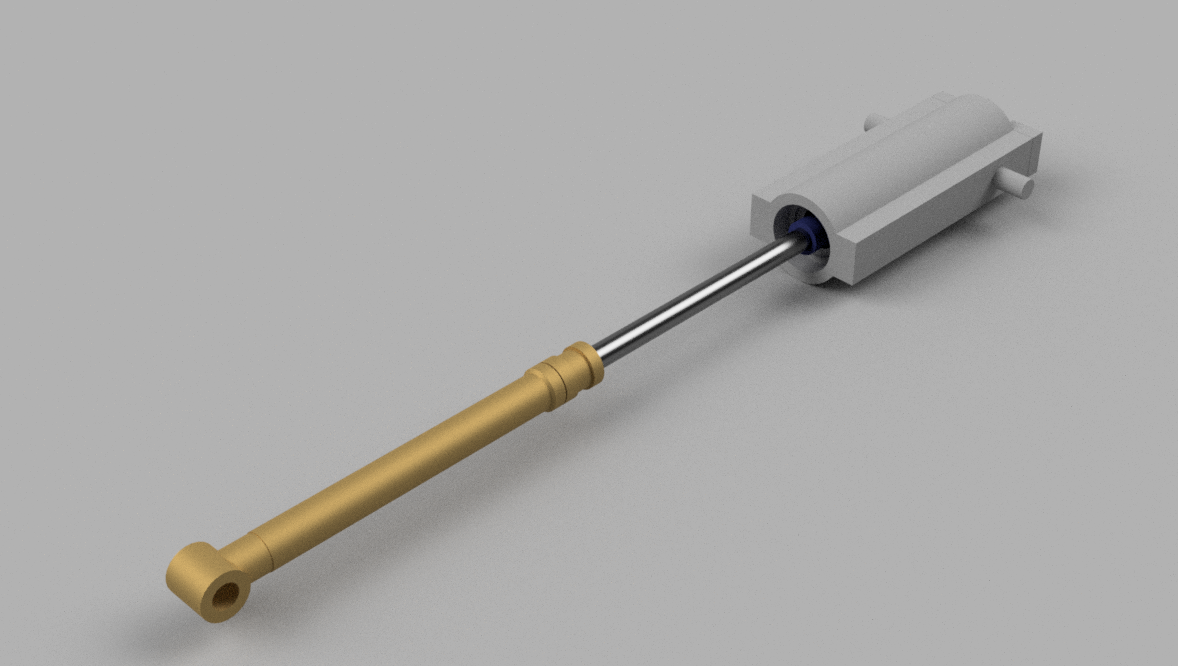
Linear actuator
Linear actuator will be used to move main crane jib. Currently the plan is to use 6mm gear motor and 2mm threaded rod, and resin print the casing.
It could later turn out that an ordinary servo will work better and provide more torque.
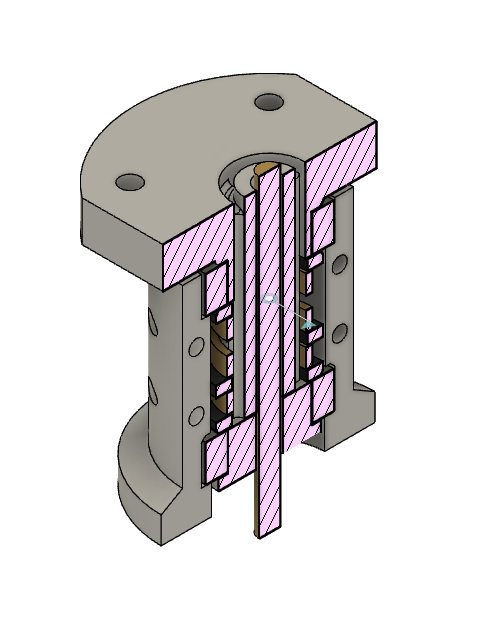
Slip ring
To hold all the superstructure and to pass electrical signals, a load-carrying slip ring is needed. This current design has 2 ball-bearings with 6mm and 8mm bore diameter and is printed with FDM.
So far test prints were unsuccessful, seemingly due to problems with filament humidity. It was a rainy and very humid winter in the Netherlands, so my filament (both PLA and PETG) is very difficult to print with now. Waiting for a drybox so I can continue with tests.